MaskedMimicPlus
一个统一的端到端人形全身(全身包括灵巧手共153个自由度)动作控制框架,覆盖从模仿跟踪到目标导向操控的多种任务形式。
当前已完成: ✔ 全身动作模仿
正在调试:
稀疏约束下的远程遥操
自主执行自定义任务
一、效果展示
全身动作模仿
模仿人类走到桌边并抓起桌面上的物体。
物品抓取成功率统计
| 抓取类型 | 物体类型 | 物体举例 | 成功率 | 主要失败原因 |
|---|---|---|---|---|
| 单手 | 常规形状物体 | 闹钟、苹果、香蕉、鼠标、相机、大象模型等 | 99% | - |
| 单手 | 细长的物体或者扁平的物体 | 高脚杯、水果刀、牙刷、眼镜等 | 11% | 容易抓错位置 |
| 单手 | 有孔洞把手的物体 | 杯子的把手、剪刀等 | 2% | 容易把物体撞翻、手指无法穿过孔洞把手 |
| 单手 | 大型物体 | 大立方体、大球体等 | 32% | 容易抓不稳而滑落 |
| 双手 | 各类物体 | 各类物体 | 13% | 双手配合难度大,模型退化成保守模式(只接触不用力举起) |
部分抓取失败案例展示
双手配合难度大,模型退化成保守模式(只接触不用力举起)
物体太大,用力不合适导致抓取滑落
稀疏约束下的远程遥操
正在调试中
自主执行自定义任务
正在调试中
二、概述
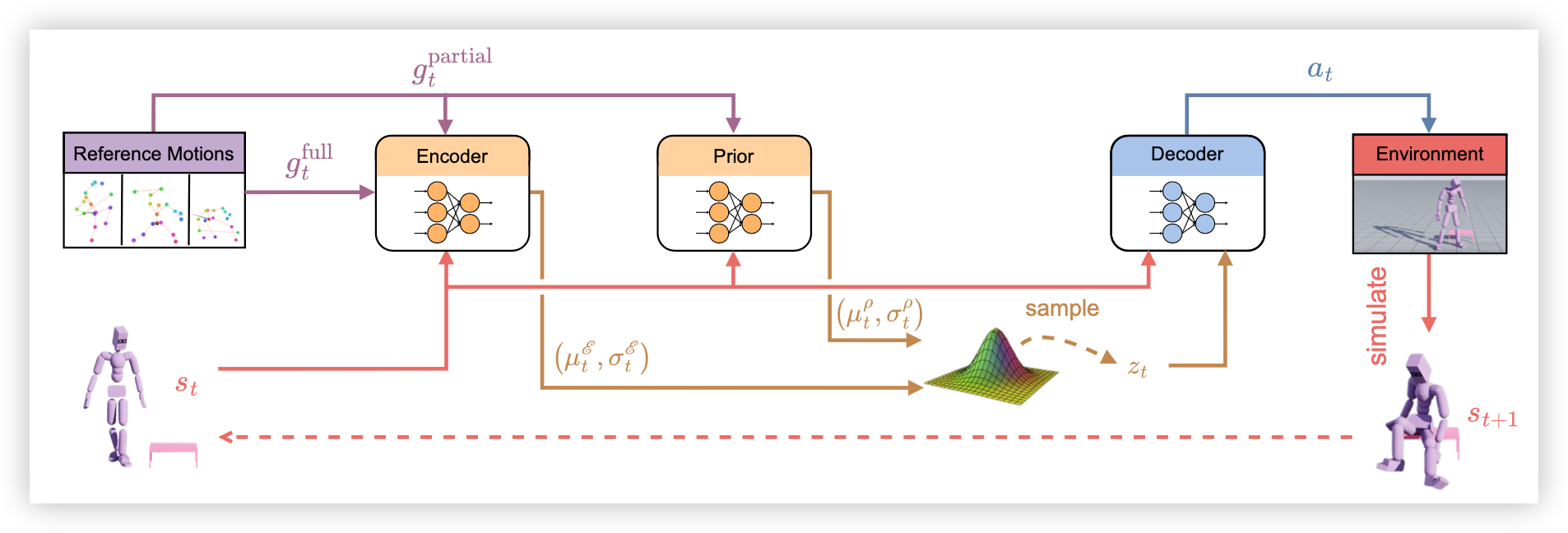
1.1 系统架构
1.1 特点
与传统使用物理引导、逆运动学或手工设计控制器的管线不同,本项目强调:
1. 端到端控制(End-to-End Control)
输入:观察到的身体部分关节位姿、物体状态、以及可选的目标任务信息;
输出:每个关节的力/速度/目标位姿等控制量;
策略可以通过强化学习直接优化控制输出,因此整个策略:
不依赖 IK解算;
不需要传统硬编码模块化分解;
控制规律由模型自动学习得到,支持更复杂的全身动作协调;
2. 基于 VAE 的动作风格潜变量(Natural Motion Latent)
项目采用 VAE(Variational Autoencoder)结构来学习人体自然动作风格:
编码器将复杂的全身动作压缩为一个低维隐变量;
隐变量代表动作风格、惯性、身体配合关系;
解码器根据隐变量生成物理一致的动作;
优点:
可以在稀疏约束下对多种可能的动作分布进行建模,从而避免出现模式平均问题;
解耦了高层控制策略和低层动作控制,可以快速微调适配新任务;
3. 稀疏控制能力:只指定部分关节,其余由神经网络自适应补全
在远程控制(teleoperation)或 VR 输入中,常见情况是:
只有 头部和双手的位姿;
或者只是给定“物体目标位置”;
或者部分关节被跟踪,其余要自动补全;
本项目支持:
✔ 只指定部分关节(例如:头 + 双手),其余身体动作由策略自适应生成
这是端到端 + VAE 结构的联合优势,使得系统可以:
在 VR 中生成完整的人形动作;
自动调节躯干、腿部、重心、平衡;
适应不同体型的角色;
在抓取物体时自动做姿态协调;
自主执行自定义任务;
也非常适合未来扩展为遥操作机械人或全身 teleoperation。
1.2 与相关工作的关系
本项目基于 MaskedMimic 的开源代码进行扩展开发,将其能力从“纯全身模仿(AMASS)”拓展至“人—物交互模仿(GRAB)”。
原始 MaskedMimic 仅支持 AMASS 数据集的无物体全身动作模仿,不包含手部接触和抓取相关能力。
在此基础上,本项目完成了以下系统级扩展:
构建 GRAB 数据的人形重定向与物体对齐流程;
重新设计奖励结构以支持抓取接触与物体状态约束;
修改训练管线以支持人—物交互的物理建模;
最终实现了在物理仿真环境中模仿 GRAB 数据中人类抓取动作的能力。
本项目的研究方向与 NVIDIA 后续提出的 MaskedManipulator 存在一定重叠,但其实现代码尚未开源,本项目的扩展与实现均独立完成。
相似方向
都以端到端物理控制为核心;
都关注人—物交互场景下的模仿与控制问题;
都继承自 MaskedMimic 的端到端模仿框架;
不同点
奖励函数结构更轻量,计算量显著减少: MaskedManipulator 使用较复杂的表面点几何约束(例如最近点方向一致性),需要实时计算大量指尖/物体表面距离。本项目完全不需要这类几何约束,以更简洁的接触/姿态目标奖励,因此计算量显著减少,训练更高效;
无需修复GRAB中物体位姿: 直接在重定向过程中适配不同体型带来的手-物品相对位姿误差,显著减少了重定向模块复杂度和耗时;
三、后续工作
1. 稀疏约束下的远程遥操
目前VAE架构下已具备稀疏关节约束下的远程遥操,但是模型还需要进一步微调训练和调通遥操部分pipeline。
2. 自主执行自定义任务
增加路径规划逻辑和物品摆放位置的自定义接口,让机器人可以执行类似于工业流水线中的自定义任务。
四、相关参考
MaskedMimic- Unified Physics-Based Character Control Through Masked Motion Inpainting
PULSE -UNIVERSAL HUMANOID MOTION REPRESENTATIONS FOR PHYSICS-BASED CONTROL